
国際レスキューシステム研究機構(IRS)、慶應義塾大学大学院 メディアデザイン研究科 リアリティメディアプロジェクト、内田洋行は2013年5月21日、「体育会系ロボット学 —人工知能、ロボット工学、レスキューシステム、エンタテインメント技術は我々の生活をどう変えるか—」を開催した。
同セミナーでは、日本のロボット学の第一人者として「ロボット情報学ハンドブック」の制作に携わった松原仁氏(公立はこだて未来大学 複雑系知能学科 教授)、野田五十樹氏(産業技術総合研究所 サービス工学研究センター サービス設計支援技術研究チーム 研究チーム長)、松野文俊氏(京都大学 工学研究科 教授)、稲見昌彦氏(慶應義塾大学 大学院 メディアデザイン研究科 教授)、大須賀公一氏(大阪大学大学院 工学研究科 機械工学専攻 教授)の5人が登壇。各人が関わってきたロボット学の知見をさまざまな切り口から披露してくれた。
本稿では、その中で最も“体育会系”というテーマに則していた、京都大学 工学研究科 教授 松野文俊氏の講演「『守破離』—ロボットの運動知能」の模様をお届けしたい。
 松野文俊氏の講演「『守破離』—ロボットの運動知能」
松野文俊氏の講演「『守破離』—ロボットの運動知能」
「守破離」—ロボットの運動知能—
 京都大学 工学研究科 教授 松野文俊氏。「体育会系ロボット学」のトップバッターを務めた松野氏。講演の冒頭、「今回の登壇者5人中4人が体育会系出身で、残り1人も体育会系的化学系(!?)出身であることから、そのような名称に決まった」(松野氏)と裏話を語ってくれた
京都大学 工学研究科 教授 松野文俊氏。「体育会系ロボット学」のトップバッターを務めた松野氏。講演の冒頭、「今回の登壇者5人中4人が体育会系出身で、残り1人も体育会系的化学系(!?)出身であることから、そのような名称に決まった」(松野氏)と裏話を語ってくれた皆さんは、「守破離」という言葉を聞いたことがあるだろうか。これは、日本の茶道、武道、芸術などにおける師弟関係の在り方の1つで、これらの文化が長い歴史を経て、発展・進化してきた創造的な過程のベースになっている思想である。
まず、師匠から学んだ型を忠実に“守”り、それを身に付ける。その段階を終えたら、次にその型を自分自身と照らし合わせ、型を忠実に再現しようという殻を“破”り、自分に合ったものに昇華させる。そして、そこからさらに、全てを理解した上で、師匠の教えから“離”れ、何物にも捉われない新境地へ到達する(自分の形を作り上げる)。簡単に言ってしまうと、入門から免許皆伝、達人、名人と呼ばれる領域に到達するまでのプロセスを示した言葉だ。
ホンダの「ASIMO」が実現するような、「歩く」「走る」「ジャンプ(ケンケン)する」といったような動き(運動)は、人間や動物といった地球上の生物が有する“技”であり、生物の巧みな運動知能に大いに関係するものであるという。「今回の講演では、このような生物が持つ素晴らしい技を、ロボットがどうやって獲得していくのかという話をしたい。これはまさに“体育会系”というセミナータイトルにぴったりの話題ではないか」と松野氏。
ロボットの師匠は生物
ASIMOの成長ぶりからうかがえるように、ロボットの性能は日々進化しており、今後ますます多くの技(運動機能)を身に付けていくと考えられる。こうした状況を踏まえ、松野氏は「人間や動物などをお手本(師匠)とし、そうした生物が持つ技のメカニズムや巧みな運動知能を正しく理解して、学ぶことが必要だ」と唱える。
この考えの下、自身の研究の中で「生物の運動機能・技の仕組みを人工物で作り(ロボットとして実現し)、その機能の理解が正しいかどうかを検証するアプローチを行ってきた」(松野氏)という。具体的には、蛇は足がないのになぜ前に進めるのか、猫はどうやって宙返り降りを実現しているのか、体操選手の鉄棒技(大車輪)はどのように習得したのかなど、学術的理論や特徴を工学的観点から人工物として実現(動きを再現)して、技のメカニズムや獲得プロセスを解明し、さらなるロボット研究・応用へとつなげてきたそうだ。この段階は、師匠である生物の動きを検証・再現させるという意味で、守破離の“守”の段階に近い。
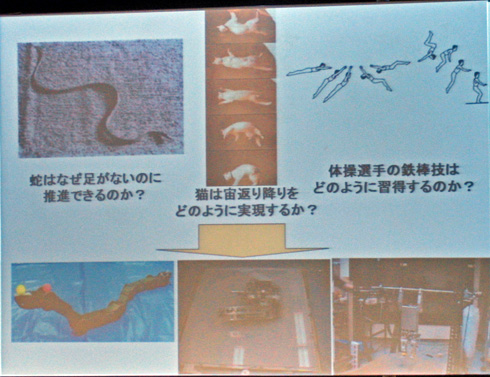 生物の動きを人工物(ロボット)で再現し、検証しながらそのメカニズムを解明するアプローチ。鉄棒技・宙返りを再現する「アクロバットロボット」や蛇の推進原理を再現した「蛇型ロボット(ACM-R3)」の実験例を紹介
生物の動きを人工物(ロボット)で再現し、検証しながらそのメカニズムを解明するアプローチ。鉄棒技・宙返りを再現する「アクロバットロボット」や蛇の推進原理を再現した「蛇型ロボット(ACM-R3)」の実験例を紹介生物の群知能・群行動からチームワークを学ぶ
さらに、松野氏は「単体(個)での技だけでなく、“群れ”における行動・知能についても生物から学ぶべきことが大いにある」という。
群れをなす生物は、どのようにして自分以外のものとコミュニケーションをとり、どのようにして何らかのプロセスを効率良く完遂できるのか。例えば、災害現場などで複数のロボットが協調しながらレスキュー活動を行うようなケースを考えてみると、一刻の猶予も許されないため、個々のロボットの能力だけでなく、チームとしての効率的な動き方なども問われてくる。そういった意味からも、生物の群行動・群知能は学ぶに値する、非常に興味深いものといえる。
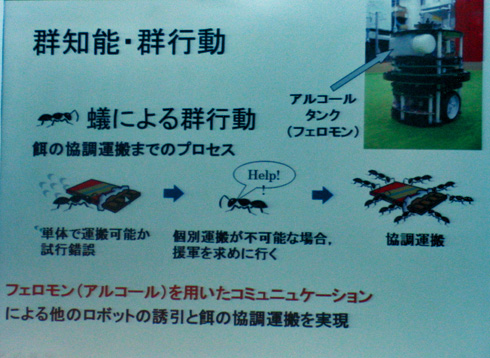 群知能・群行動について。アリによる群行動について、餌を運ぶプロセスを紹介
群知能・群行動について。アリによる群行動について、餌を運ぶプロセスを紹介最も身近な群行動をする生物といえばアリだろう。「アリが餌を運搬する場合、まず単独でその餌が運搬可能かを試行錯誤し、それが不可能であれば化学物質(フェロモン)を用いたコミュニケーションで他の仲間を呼び寄せ、群れになり、協調運搬を実現している」(松野氏)。これについても、フェロモンに見立てたアルコールと触覚に見立てたアルコールセンサーを用いたロボットによる検証を行い、他のロボットの誘引(餌のある方へ導く)と餌の協調運搬を実現した。この実験では、餌を探す、餌を押す、押してダメならアルコールをまくといったような簡単なアルゴリズムのみで協調運搬を実現しており、ロボット間のネットワーク通信は実装されていない。「こうしたシンプルな仕組みでも、だんだんと(本物のアリのように)協調的な動作が行われていくことが分かった。それにしても、生物の持つこうした知能は一体どこから生まれてくるのか。非常に面白い」と松野氏はどこかうれしそうに語っていた。
さらに、編隊移動する鳥や魚が、隣接する仲間(他の存在)とコミュニケーション可能な距離を維持しながら、進路を邪魔する障害物を回避し、回避後にまた元の編隊に戻るメカニズムなども興味深い。「個(単体)で見ると、自分の周辺の情報しか入ってこない・分からないのに、隣接する個が相互に作用することで、群れ全体の振る舞いが、あたかも制御されたものであるかのように見える」(松野氏)。これについても、同じ方向に進み、隣接するロボットに近寄り過ぎたら離れる、離れ過ぎたら近寄るという単純なアルゴリズムを組み込んだロボットで検証。相互に通信しているわけでもなく、分散化された個が持つ周辺情報だけで、群れとして全体を制御しているかのよう動くことが確認できたという。
 エージェント(他の存在)間の相互作用に基づく群制御の紹介
エージェント(他の存在)間の相互作用に基づく群制御の紹介Copyright© 2013 ITmedia, Inc. All Rights Reserved.